
Loud Box!
I've had a history of bringing derpy 12lbers to MassDestruction.

Most have been pretty bad one nighters, and get thrown away after the competition (like the Noodle Monster shown above), and I decided it might be time to build one that could last a little while. Enter the Wangs:

These were some uber cheap gearboxes Fred bought from China that are essentially Banebot's old 36mm planetaries, mated to 550 sized motors. I ended up driving these with h-bridge controllers I had left over from Mobile Autonomous Systems Lab (MASLab). Unfortunately, the controllers require analog pwm for signalling, as opposed to RC pwm from my radio, so I had to introduce an Arduino nano into the electronics to translate the communication (shoutouts to freshman year self for being interested in software :p ). With that working it was time for some design...
I wanted a robot that would not only work well as a sportsman robot, but also drive well on all surfaces. The end product ended up being a 4WD modular robot. The first module being
.
.
A WHEEL

I figured that even if this robot didn't work as a sportsman, it could at least get people used to driving robots with high inertia weapons. I was soooooo right.
The build began like any of my other builds with about an hour on the waterjet, followed by rapid assembly.


Pretendobot A big difference was that I still wanted to make nice billety parts

I CNCed my own T81 hubs to mate with the wheels, and integrated sprockets.

The usual pile of parts.

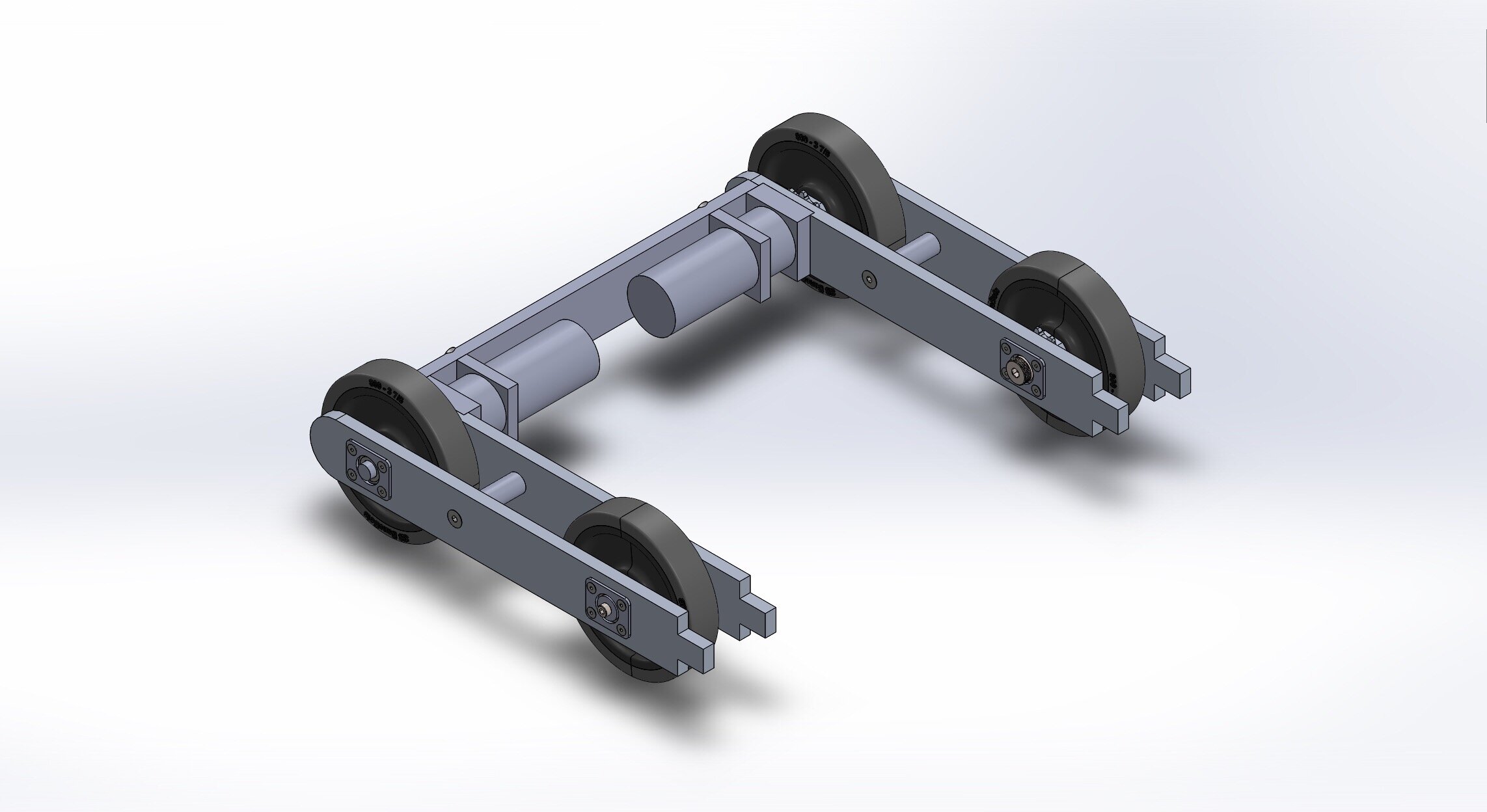
Just the drivetrain
My friend Mason is extremely good at working with steel and offered to make me my wedglets. He took some box tubing, cut out a triangle on the band saw, mashed the ends over, and a few welds later we had razor sharp wedglets!
As for the 'weapon", the wheel was too heavy and high inertia for the small motor I was using (5010 pancake outrunner) and so I turned down the sides of the wheel and drilled a ton of holes to reduce weight and inertia. Worked like a charm! And made the robot look much cooler.

The robot worked quite spectacularly :) .
It even won its first event in the Mass Destruction Sportsman class!
Now it was time for some more interesting weapons...

Module #2 the lifter
This simply used a 550 sized motor with a custom gearbox made from drill motor gears along with a chain reduction to lift.

Gear tube V1. I wasn't really thinking when I made this and it was kind of a pain to pocket out the tube on the CNC mill. Additionally, the bushing on the output was kind of a dumb idea sooooooo

Out came version 2 which was a much better gearbox. It was just the ring gear sandwiched between two plates, with an actual bearing on the output.
Around this time, one of my drive controllers also caught fire because the drive motors were just ever so slightly too big for it, and so I decided "wHy DoN'T i mAKe iT mORE ReLiABle wItH brUsHlEsS dRiVE?" And so I did! Conveniently the PropDrive 2830 has an 1/8" shaft to mate with my 1/8" pinions for the Wangs, and so I drilled new faceplate holes, flashed some escs with Simonk and had a lighter and faster robot!
I also decided to pocket some of the side rails for funsies


Before and after
The resulting robot was fantastic!

It's just a fun silly robot to drive around, let others drive around, and demo at public events.
More shenanigans and modules to come in the future!