
Swerve V3 and Rival Robotics S1
It’s been a while since I last updated my blog!
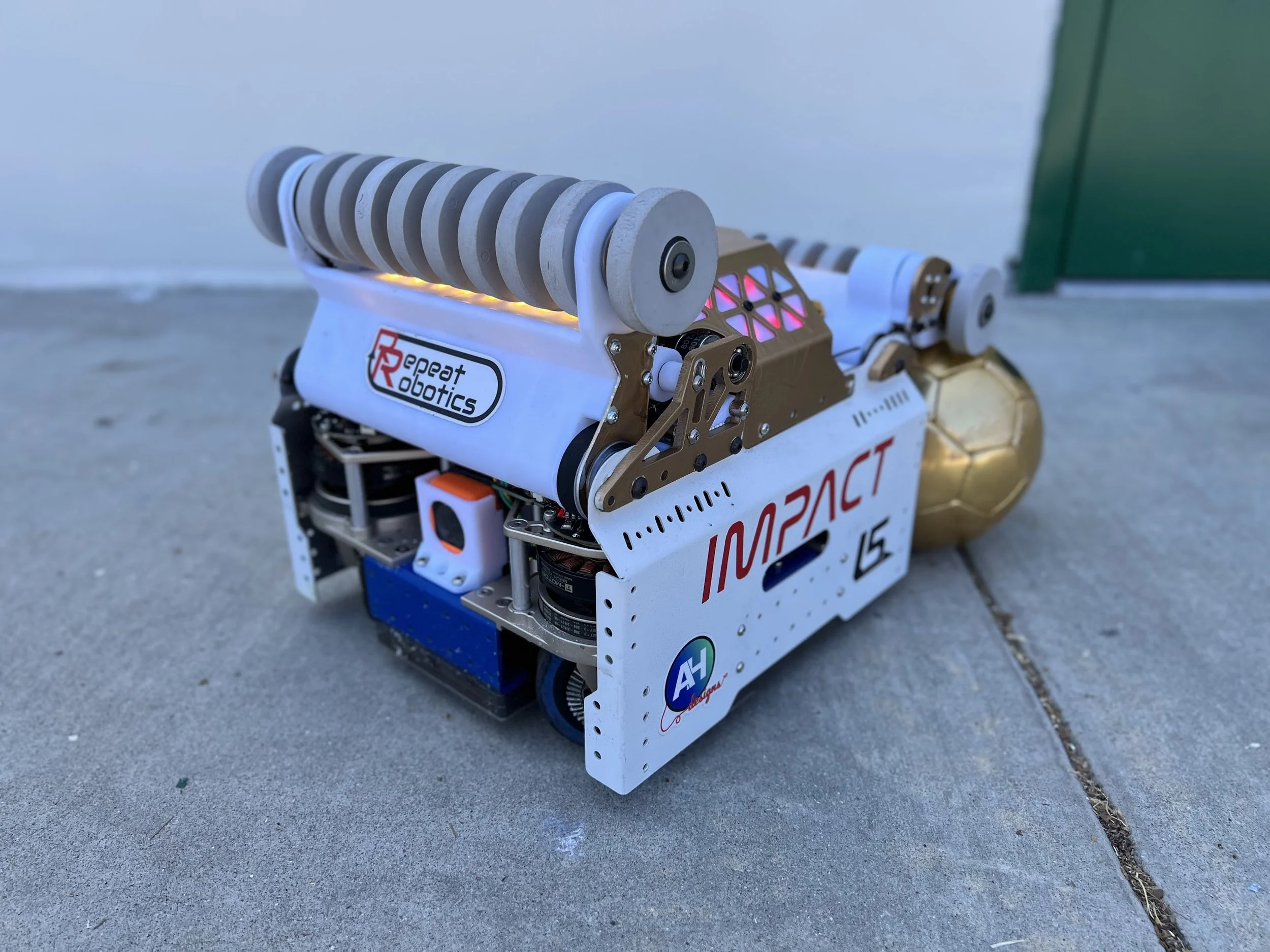
Introducing a robot collaboration between Jeremy and I:
IMPACT :the Robonauts aesthetic inspired, custom swerve drive, soccer playing robot.
Earlier this year I decided to finally hit order on parts for the new “final” swerve I had designed over a year ago. I wasn’t totally satisfied with the 3d print and slipring based Swerve V2 and I wanted to build a long-lasting all machined coaxial gear swerve. I wanted to satisfy the FRC “cool swerve” itch from long ago once and for all.
Around the time that I was kicking off the ordering of the parts, I also heard about a fellow Battlebots competitor’s new robotics competition, Rival Robotics. My swerve design didn’t have any specific task or size requirements, and the chassis is all lasercut and bent sheet metal so I opted to preemptively make it a valid frame size for Rival (10”x10”) (just in case), especially because it’s quite easy and cost effective to make a new chassis.
The robot is powered by a Kobalt battery with a Mini Cheetah power distribution board (found in most of my robots at this point), the controls are run on a custom “Robot Control Board” with an STM32F446 doing most of the work. It also contains an IMU and an sbus receiver. Each motor uses a FOC controller (Mini Cheetah style) running my port of the Mini Cheetah firmware for ease of use on my end.
The robot has a similar torque to weight ratio as FRC robots (its similar to 1690s 2024 robot based on their motors and gear ratios) but is geared for a silly 30+ mph. It’s traction limited anyway so this is just a testament to the robot being a bit overkill motor-wise (it was flexible in case I wanted to change the gearing and make a heavier robot).
I originally designed the robot to use custom wheels based on rockcrawler tires and my custom bevel gear bolt pattern was arbitrary towards that design. However, the rockcrawler tires were too soft and expanded too much at high speed. I pivoted to Banebots wheels but it was going to be difficult to transfer the bolt pattern onto the curvy surface. I whipped up a drill jig using 3mm bearings (as drill bushings) to do this.

I built the swerve, got it up to a point where I was quite happy with its performance, but was busy with other projects and responsibilities so it sat around for a bit. Fast forward to the US National YoYo Contest where Jeremy and I got to brainstorming and decided to collaborate and build a robot that fit on top of the swerve drive.
The robot, as Jeremy describes it, is “two robots in a trenchcoat”. The top rollers are powered by their own lipo and hobby escs, the arms are powered by my controllers running special RC PWM input FOC firmware (for closed loop position control), and those are both controlled by Jeremy and his radio. The bottom half of the trenchcoat is the swerve.
Because of the Rival rules for the first event, we even had weight to spare and so we added a 1/2” thick steel bellypan as ballast.
We met up on a few weekends to test integration of the shell and the base and practice driving. Thus IMPACT was born.
The first Rival event was pretty lowkey but we did end up going undefeated and winning the event, seemingly (based on Discord trends) triggering the new drivetrain wars…
I primarily drove the robot in Field Oriented mode, meaning regardless of the robot’s orientation, forward on the translation stick meant forward down the field (yaw and translation both open loop velocity). I also added a few modes which we tried throughout the day, the most promising being Robot Orientation mode. Here the yaw control joystick was mapped to a robot angle relative to the field, and the robot would close the yaw loop. It still used field oriented driving for times when the robot is aggressively bumped, but overall this mode was useful for keeping the robot aligned towards the goal for the smackdown shots. I also had modes for closed loop yaw where the yaw control stick controlled the yaw velocity (in both robot and field oriented modes).
Interview from the event:
Some example match footage (from the finals). And yes our partner is a robot that has an EDF mounted to it to blow the ball
Overall we had a ton of fun building and competing and are looking forward to the next event!