
Gripper
Its been awhile since I’ve posted and I still need to catch up on the backlog of blog posts related to the wheeled biped, and two quadrupeds now, but in the mean time I’ve started working on an arm.
I’ll make a more detailed post about the arm as I work on it more but to start off I’ve been thinking about making a simple gripper.
I wanted to use a custom brushless actuator for this in order to allow for force control and keep the communication the same as the rest of the arm (same CAN protocol) so I started with that. I still had some 5010 sized motors leftover from the first quadruped and looked into using one. That combined with the gears from an 8:1 planetary from a dead motor resulted in this actuator design inspired by Ben’s senior thesis leg actuators.


I decided to remove the aluminum body from the stator and integrate the stator into the actuator housing to save space and weight.
Physically I did this by drilling out the stator hub as big as I could with a hand drill, hacksawing the piece up to the stator laminations, and then crushing the slit circle in a vise to release the epoxied hub from its existence.
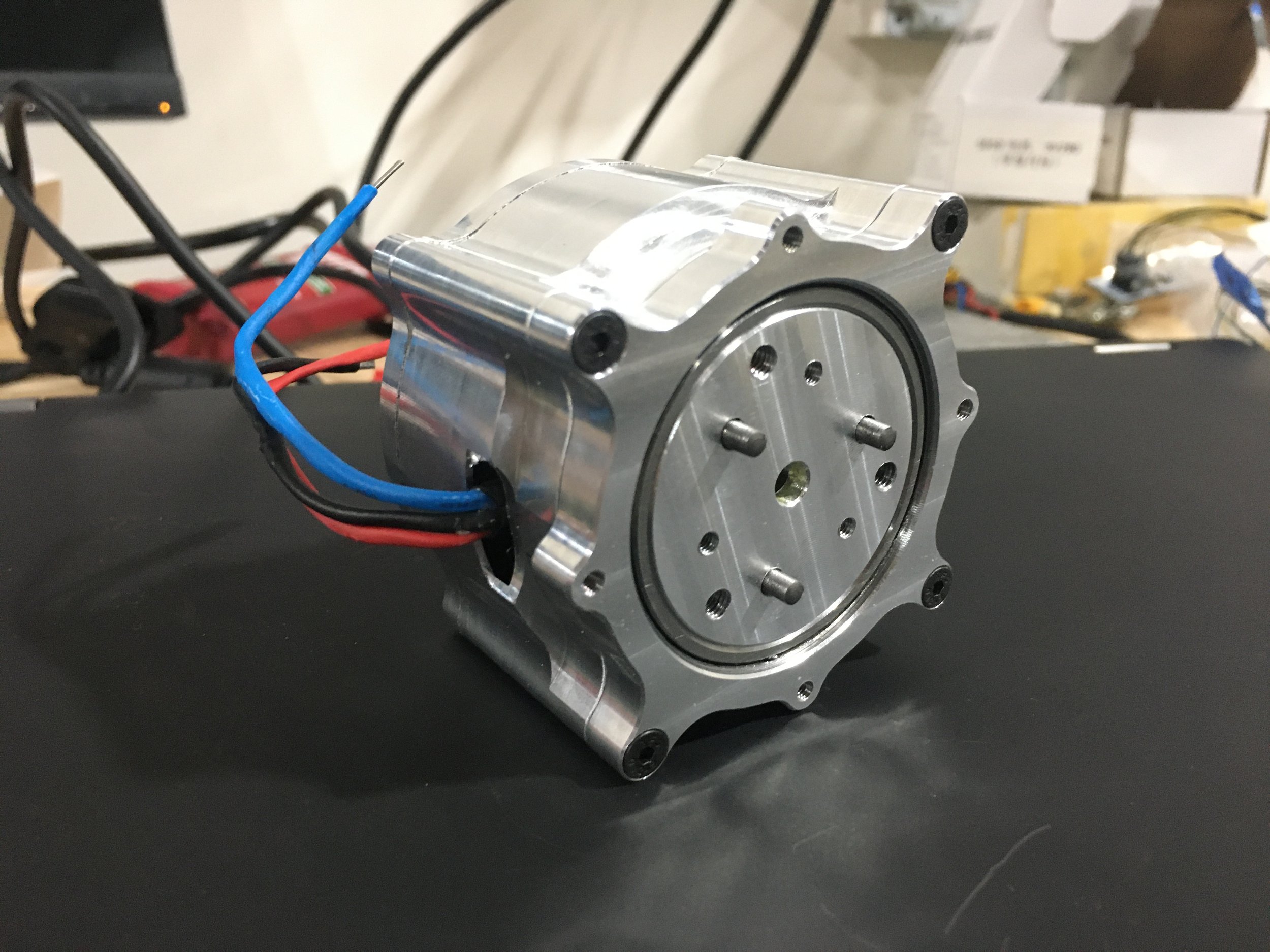
I now have access to a VF2 again and so I made the parts one weekend day. Here are some that I remembered to take pictures of before assembly.
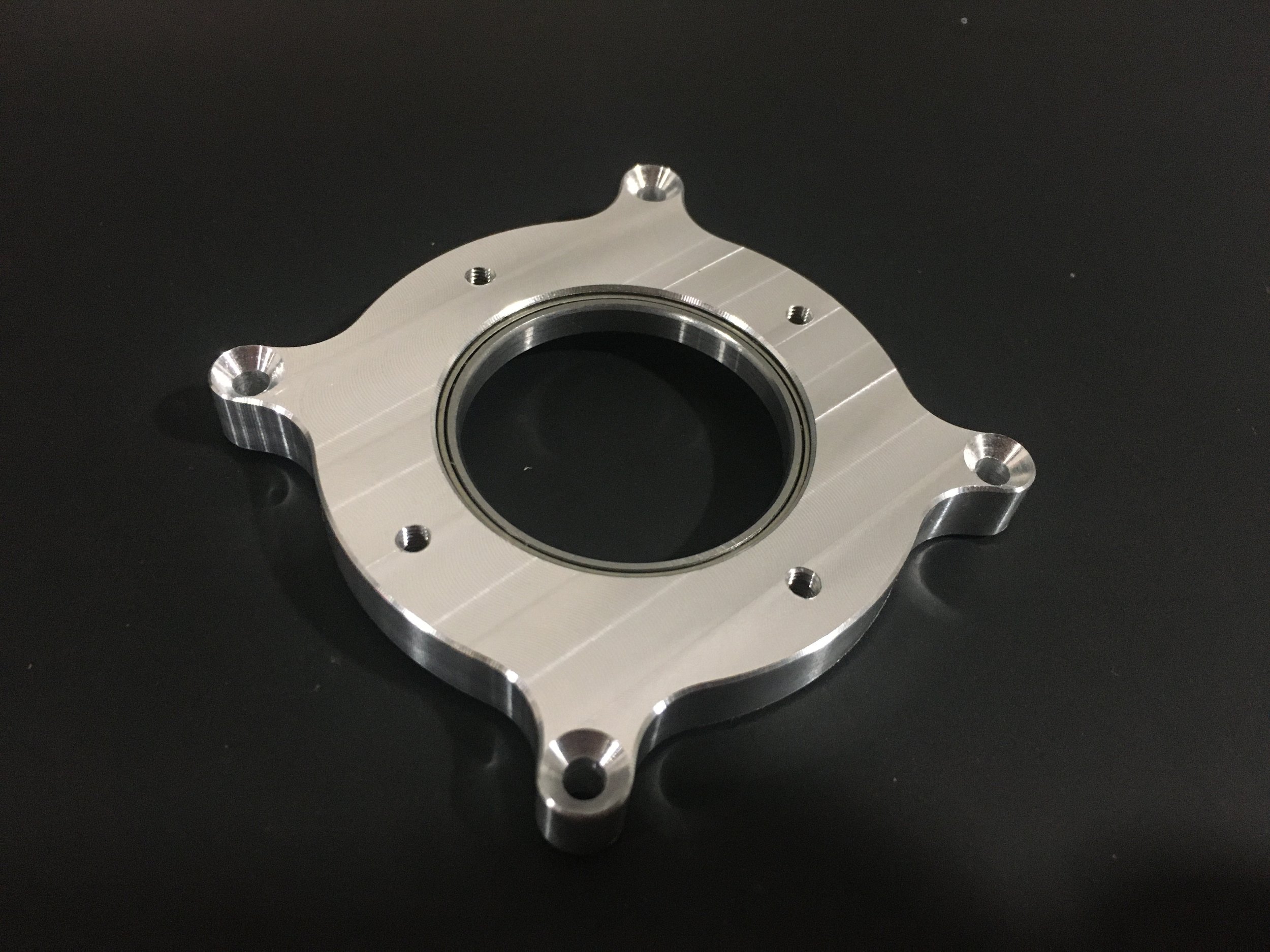
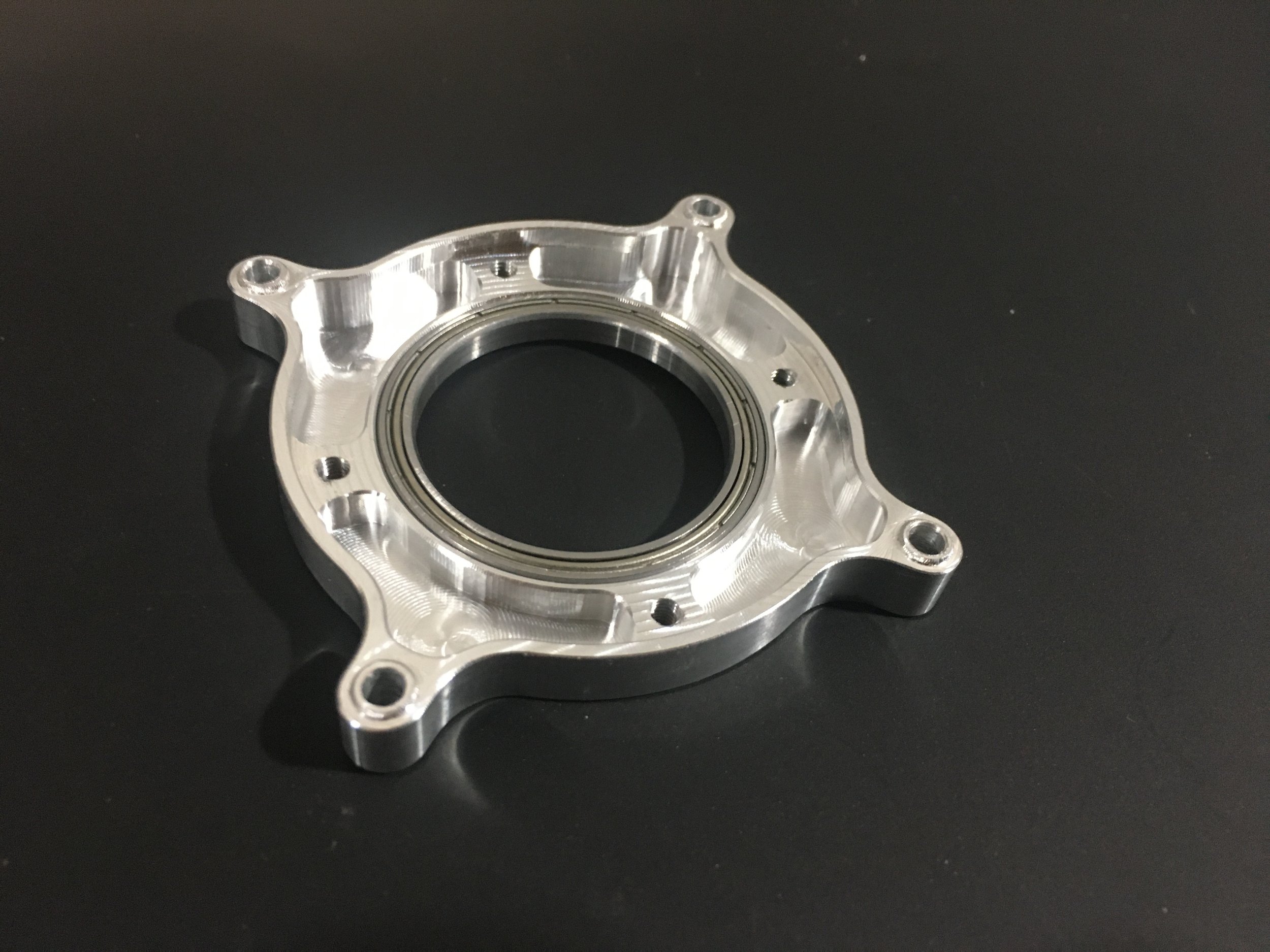


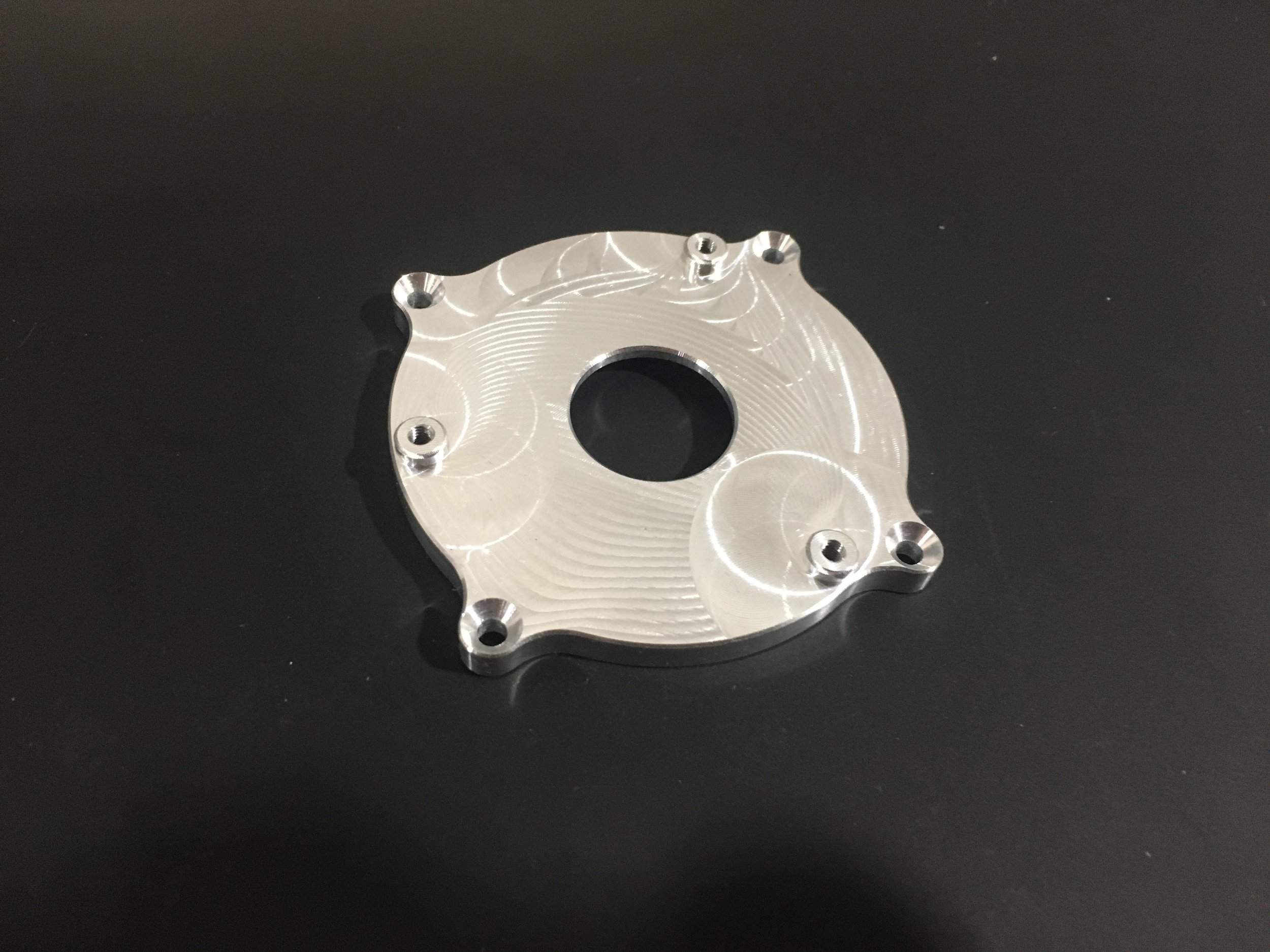
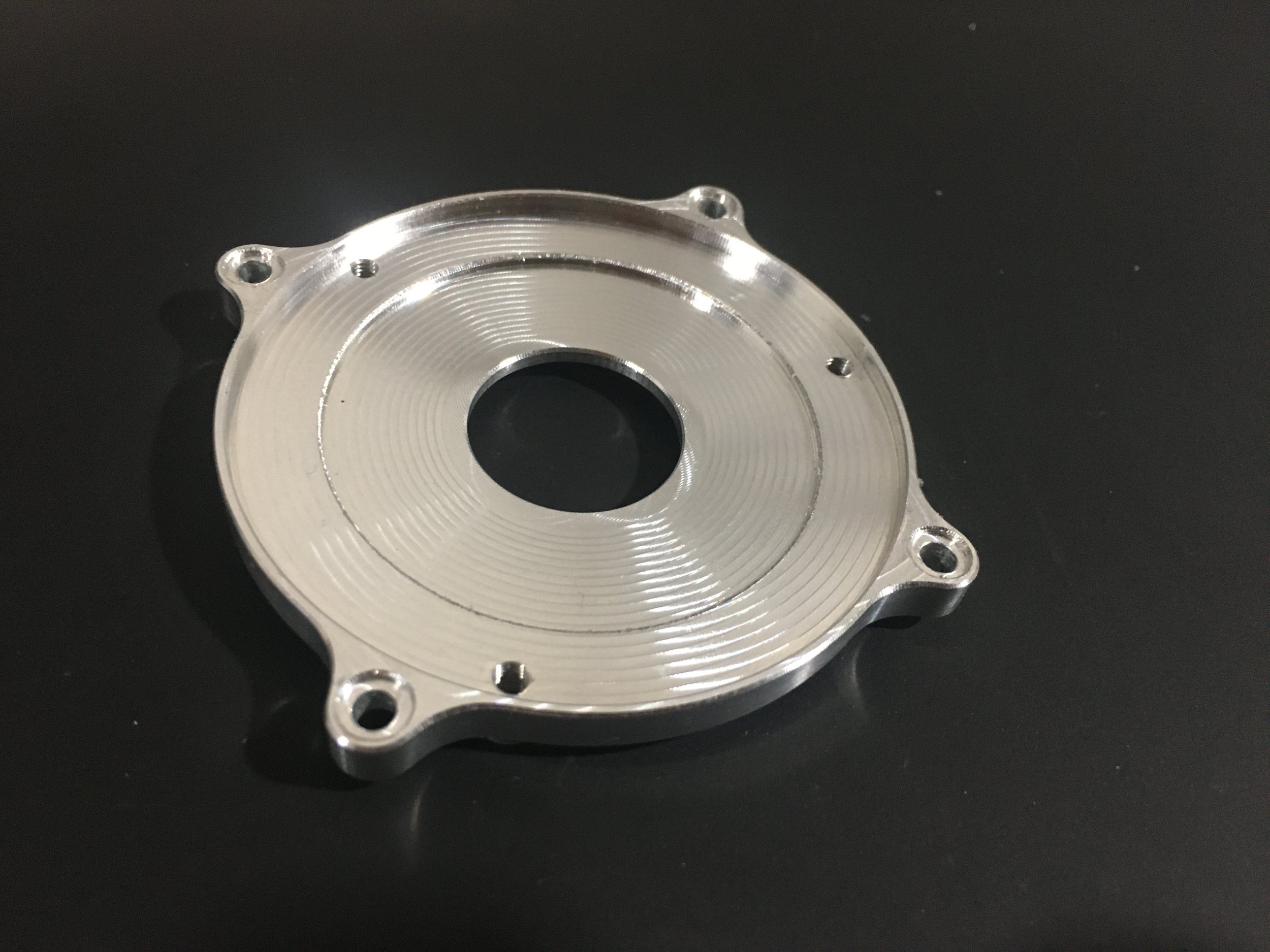
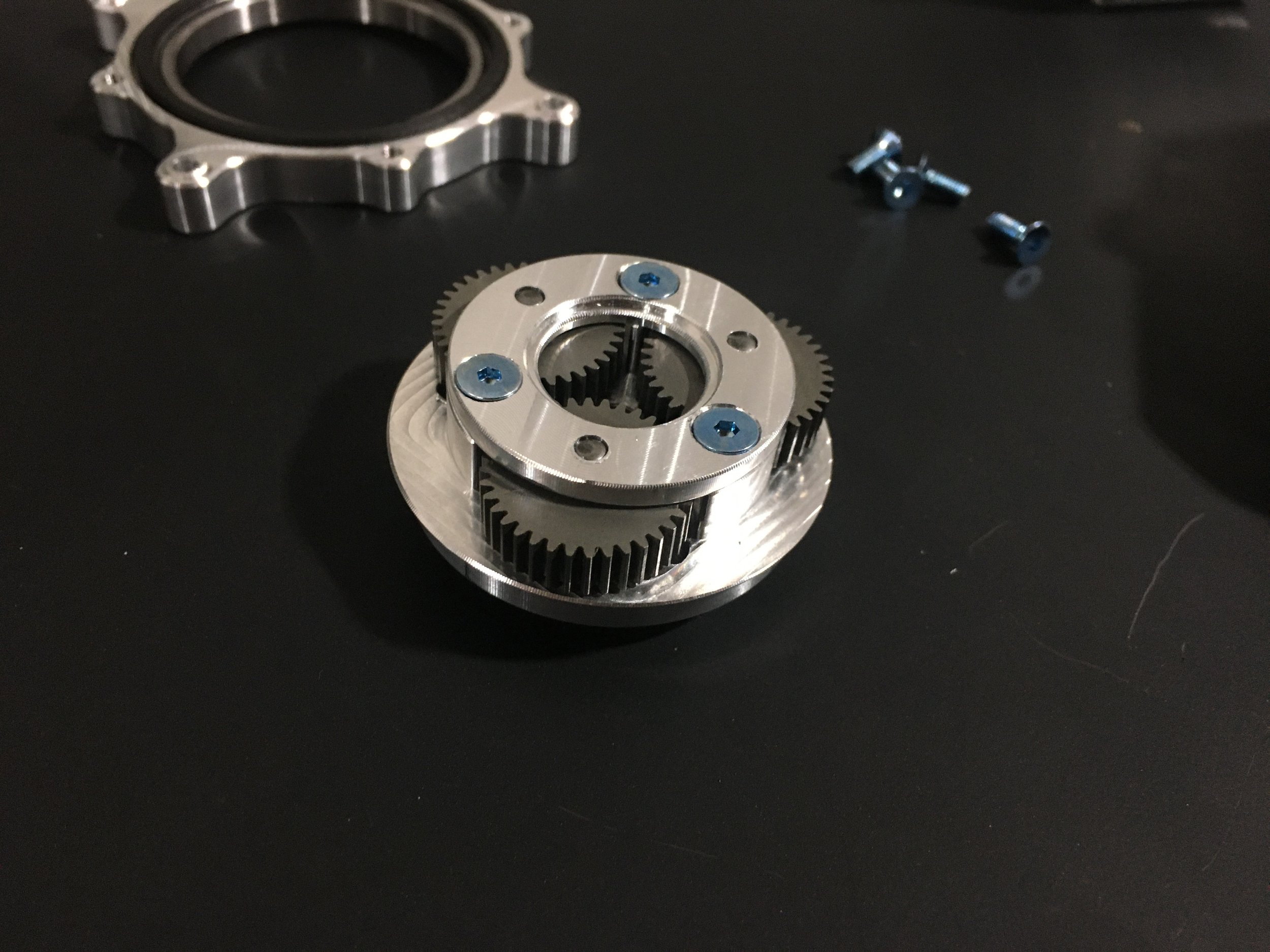
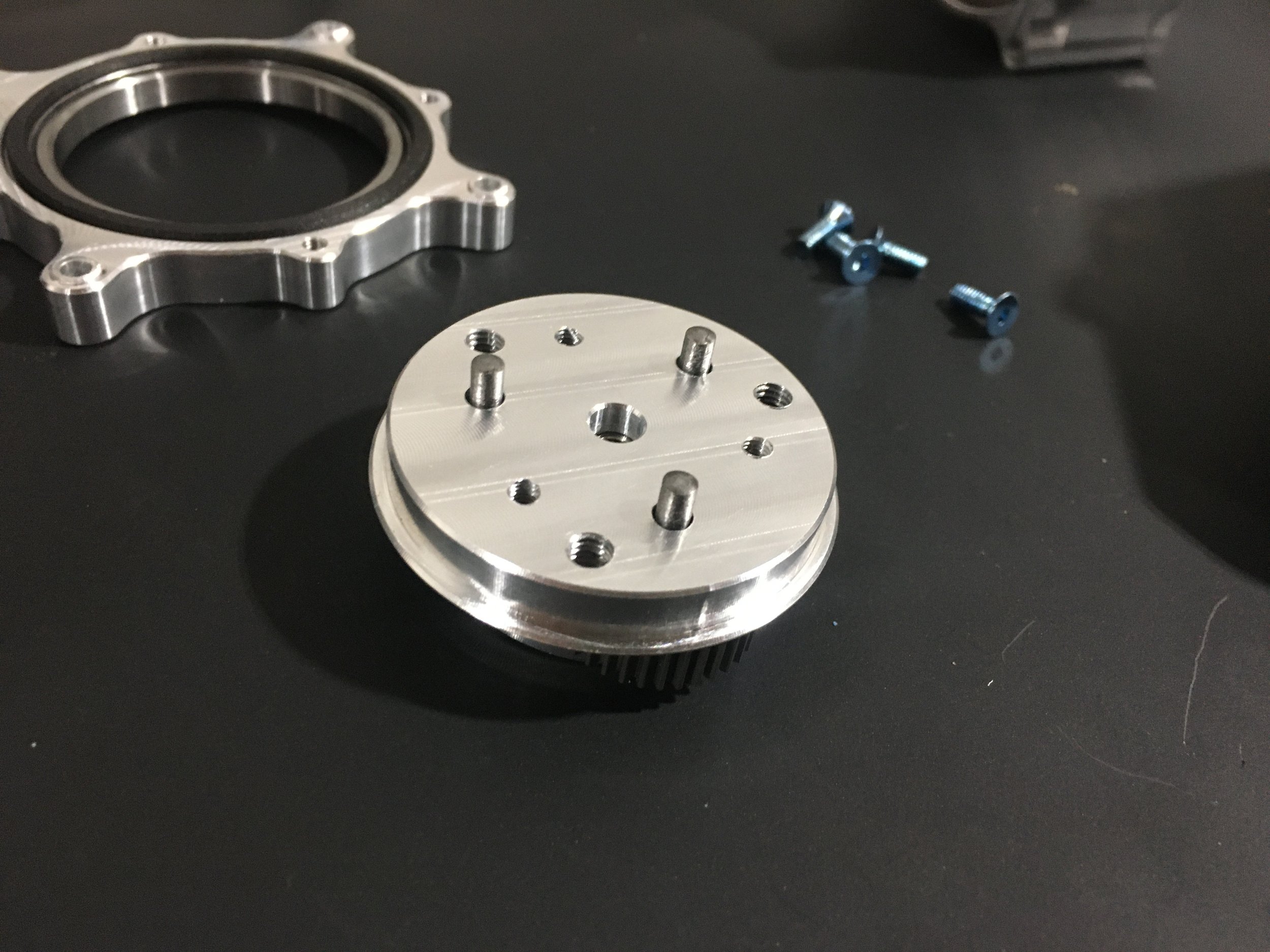
The main body piece has a lot of pieces fit/pressed into it and so was a bit stressful to make right. Luckily things worked out.
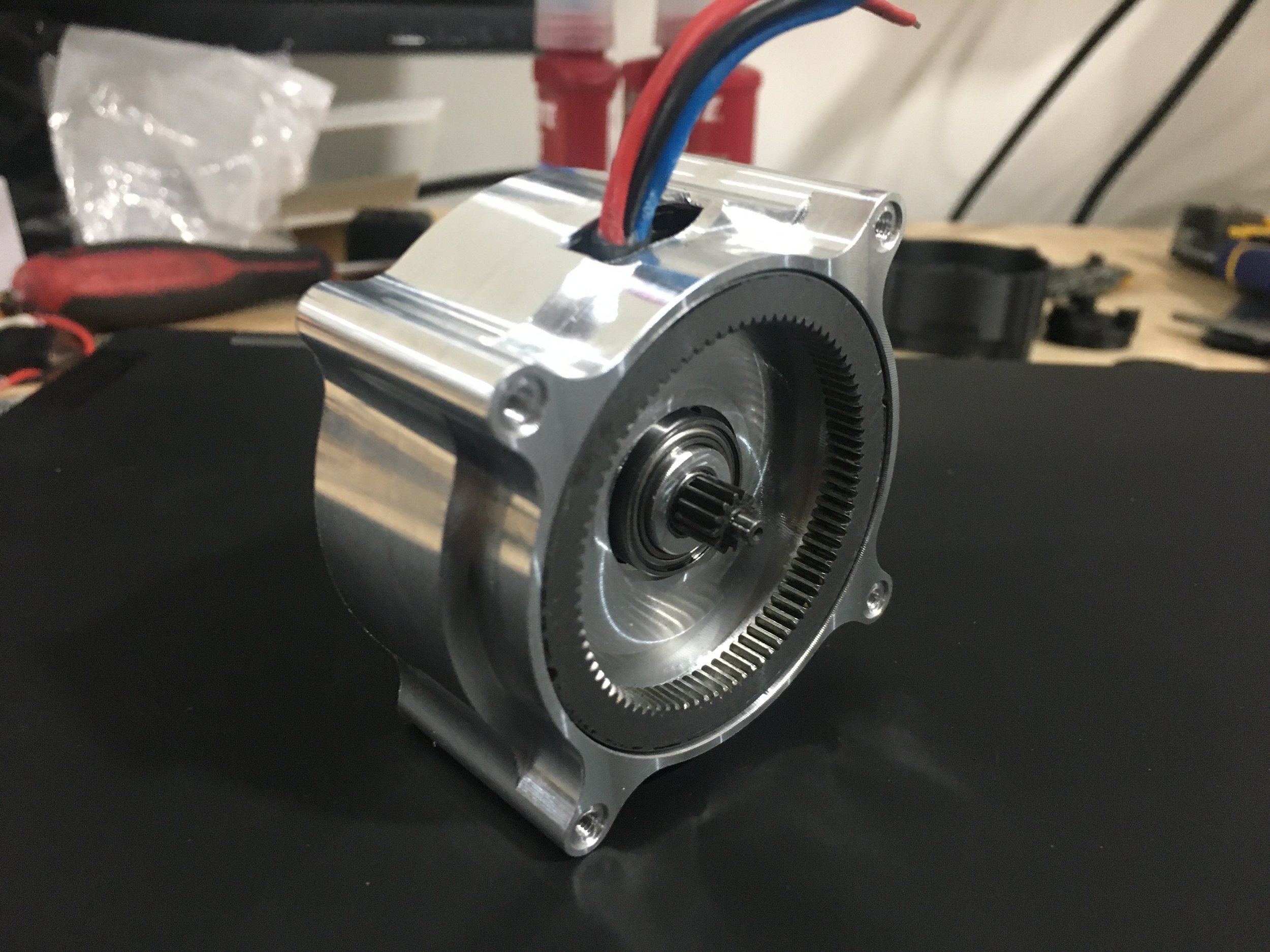

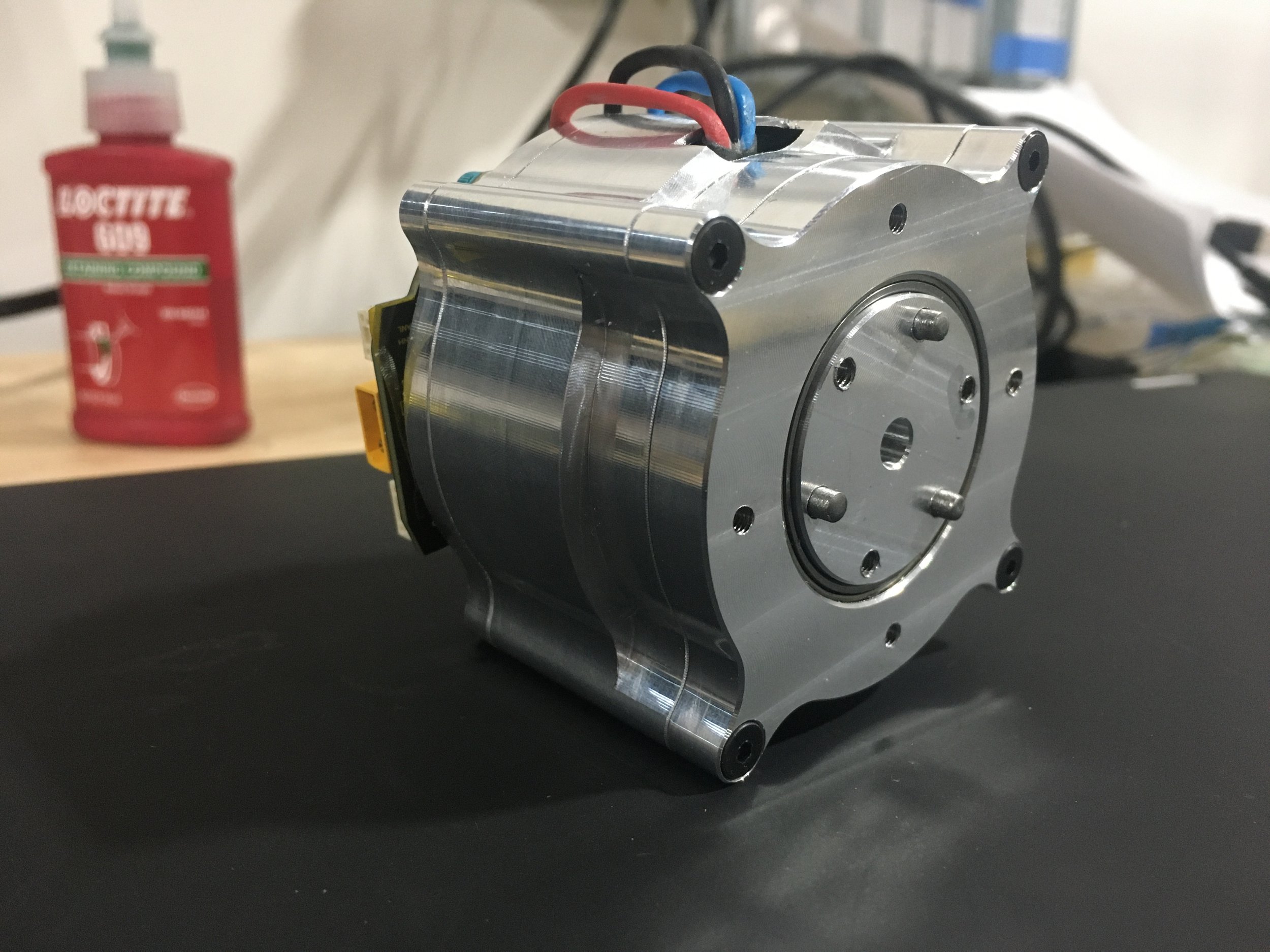
A bit more assembly later and the actuator was assembled. I also designed a variant that used a crossed roller bearing for its output with one of the arm joints in mind and so I made those part variants at the same time.
All that was left was the gripper itself and so I whipped up a quick design vaguely based on the Spot gripper and printed it out. I’m sure I’ll change the gripper design at some point as I decide what I want the arm to manipulate but that’ll just be a few prints away.

The gripper should be able to exert ~90N at the tip. For now I just flailed it on my desk to see what it could do. Some 2hz flapping and some <10N grasping was enough to entertain me for now while I move on to the next arm bits.
