
Recoil - Modular 3lb Robot

After getting my new FDM printer and dialing it in, I decided to build a new 3lb robot because I haven’t made one since my final Ricochet back in April.
Due to my change in manufacturing capabilities, I opted for a new build style. In the past my robots have all heavily relied on waterjet access and CNC mill access. The new style relies on 3d-prints, and laser cut metal parts, courtesy of SendCutSend. The printed parts have a much larger volume because I can keep them light with infill and get a high area moment for stiffness.
I opted for a modular weapon design for many reasons: to allow for diversity when fighting other opponents, the ability to quickly develop upgrades for the robot, and to help with repair time at competitions. The robot is highly inspired by my friend Jamison’s beetleweight champion, Silent Spring, who I’ve admired over the years.
Additionally I opted to use many of the weapons and hubmotor weapons I made over the years that I never used in robots.
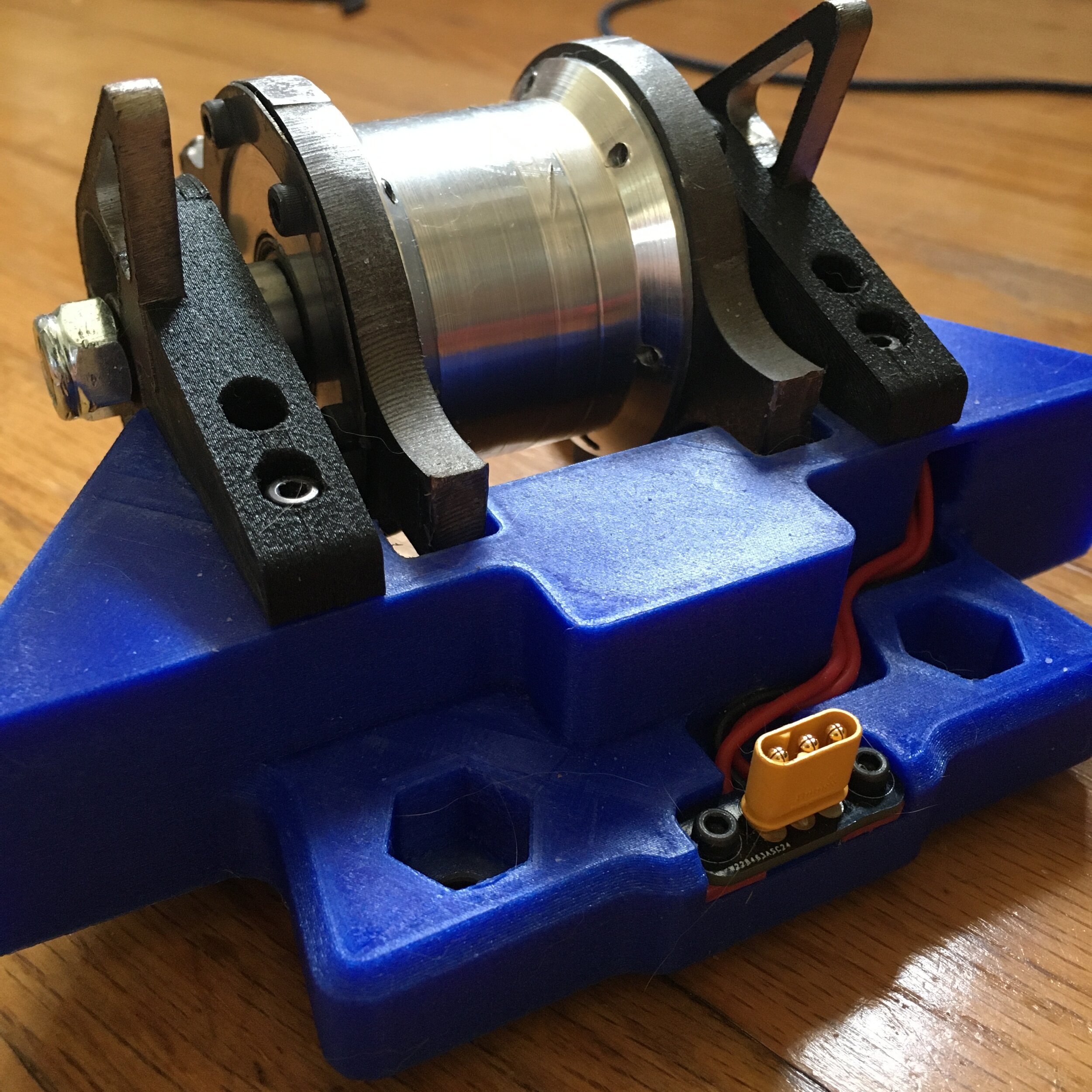
To allow for easy and quick weapon module swapping, I integrated the motor connector into the modular attachment using a simple pcb I threw in with some of my other board orders. The wires for the motor and the speed controller are soldered directly to the connector so they will not fail any earlier than they normally would.
Modules as of this blog post writing:




Butt:
The butt is printed in NylonG (glass reinforced nylon) and holds all the electronic components besides the individual module’s weapon motor. NylonG is known for its impact resistance and ease of printing compared to regular Nylon blends.
The drivetrain consists of two Botkits 22mm planetary brushed motors which are clamped with NylonG clamps to allow for ease of swapping, and some compliance under impacts. The tires are cast Simpact 60A on CNC machined aluminum hubs and UHMW wheels which I made when I was back at school.
The wheel guards are printed out of TPU and come in two flavors: fully enclosed for the horizontal weapon configuration, and guards with an open back to allow for easy self righting when using any of the vertical spinner configurations.
The top armor is typically printed NylonG, but can be swapped for .040” titanium when I’m concerned about overhead attacks.
The rear bumper of the robot is made of NylonG but can be swapped for TPU if desired.
The module interface consists of a dovetail, two hex standoffs, and the module motor connector. The module connector is mounted on a TPU mount to add some compliance, and the prints are accurate enough that the modules slide in and out easily by hand, despite the overconstraint.
This is without a doubt the most compact electronics setup I’ve done but it works so far.
The butt is designed such that all the pieces that typically take hits are bolted on and can be replaced. I favored heatserts over plastites on these parts since they would be frequently threaded and unthreaded. Whenever possible, the heatserts are also used in compression rather than relying on the melted material to prevent axial pullout.







Hub Motor Fish:
This was the first module I made and I learned a lot from it which inspired the rest of the modules. This module was more for testing since the 2830 motor inside the hubmotor fish is quite underpowered. The wedge pieces were all spares from one of the baby Uppercuts.


Hub Motor Drum:
This uses another hubmotor weapon I made for Ricochet a few years ago but no longer have a need for. This design was slightly different because I started to use SendCutSend and designed the 4mm thick AR500 skin that protects the NylonG. NylonG is great for the structure because it’s highly customizable, has good impact resistance, and is relatively stiff. It just isn’t hard enough to take a hit, so the AR skin covers that well. The forks are freely articulating to stay flush with the ground and are made with the same 4mm AR500 as the rails.


Undercutter:
This is my favorite module due to its simplicity and the fact that I rarely build horizontals. It uses Mason’s OPTIMAL HOOP (eccentric circle based disk) for a weapon. Disk work better for horizontal spinners because its harder for opponents to jam the weapon up against a wall.
I bolt on a TPU guard onto the nose of the undercutter where it’s most likely to take damage. Don’t want to have to reprint the 24 hour long main module piece every match.
Another problem with horizontals comes from their typical large diameter. A small angular deflection at the bearing can cause significant deflection at the tip of the blade resulting in many people hitting their own pulleys. To counter this I added some skid bolts that are beneath the continuous circular portion of the disk. If the disk deflects, it’ll rub against the bolt heads instead of being able to bit into anything on my robot.
Typical undercutters also run a flanged bearing to keep the disk from rubbing on the ground and not rely on a press fit bearing. I have had bad experiences with the stress concentration in flanged bearings and so I used a pair of thin titanium washers and button head m3 bolts to clamp the entire weapon assembly around some normal 3/8” bearings.





Ricochet:
I can’t have a modular robot with ol’reliable. A classic Ricochet bar and classic Ricochet motor. This uses printed parts with .066” titanium skin due to weight problems. I also am trying toothed belts for the first time (compared to round belts and v belts from the past). A side tool I made was a printed belt center to center distance checker.


