
Swerve 2021
Unfortunately the last swerve drive I made earlier this year had two pretty fatal flaws. First, the printed shafts broke after being left in the sun for too long (lolol). This alone could have been fixed but additionally the brushless motor I used to spin the wheels barely had enough start-up torque to spin the wheels. Overall I really overdid using the bad DLP printer material and so I decided I would redo the project at a later date.
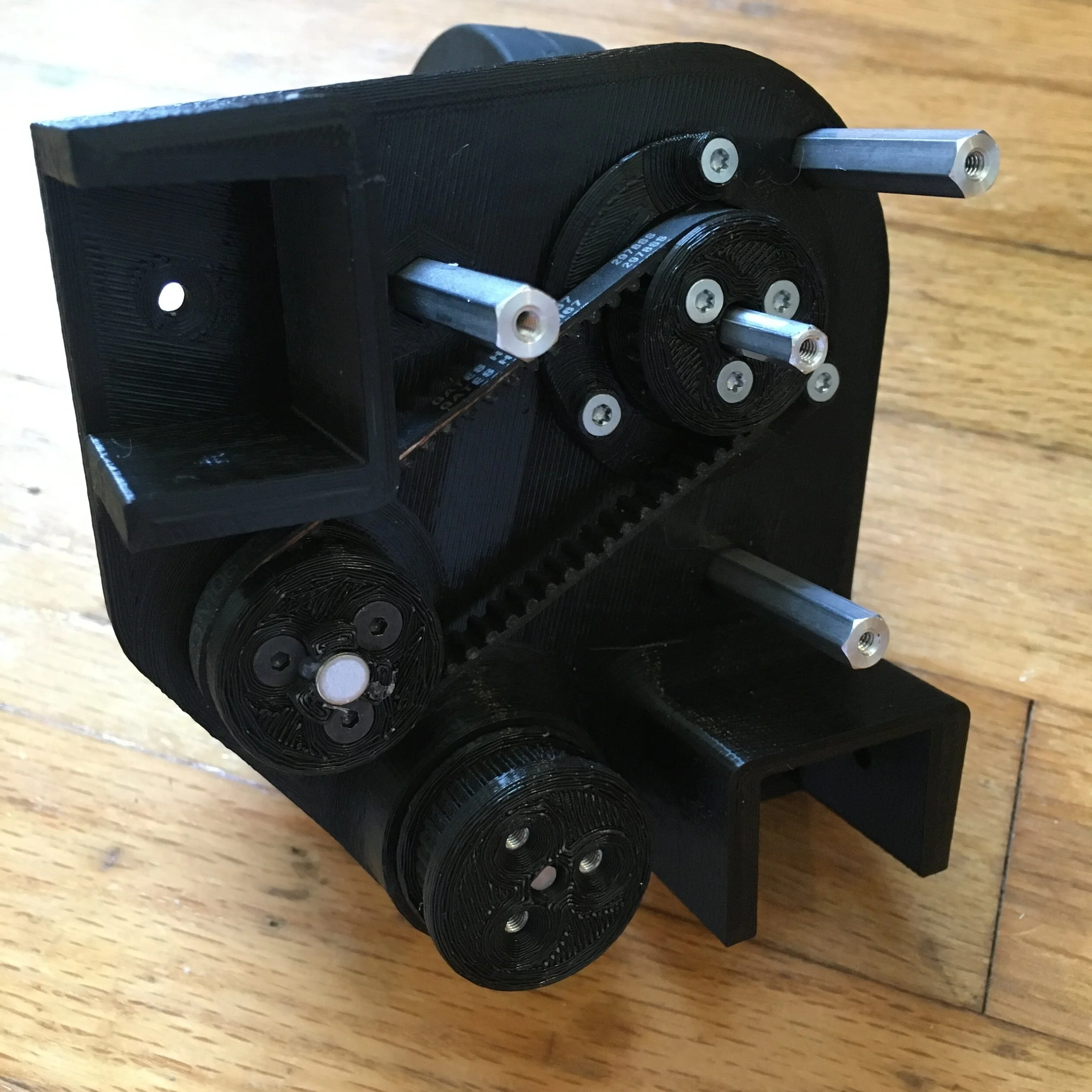
Now that I had some free time again, I decided to revisit the swerve, this time making it on my FDM printer so that I could use much more durable materials. I bought McMaster round threaded standoffs to use as dead shafts, and for the one live shaft I used a hex standoff. The benefit of using the standoffs is that they come with fairly accurate lengths and diameters, and the ends are already tapped. The bearings were all from the last swerve, or standard yoyo bearings which I have tons of.
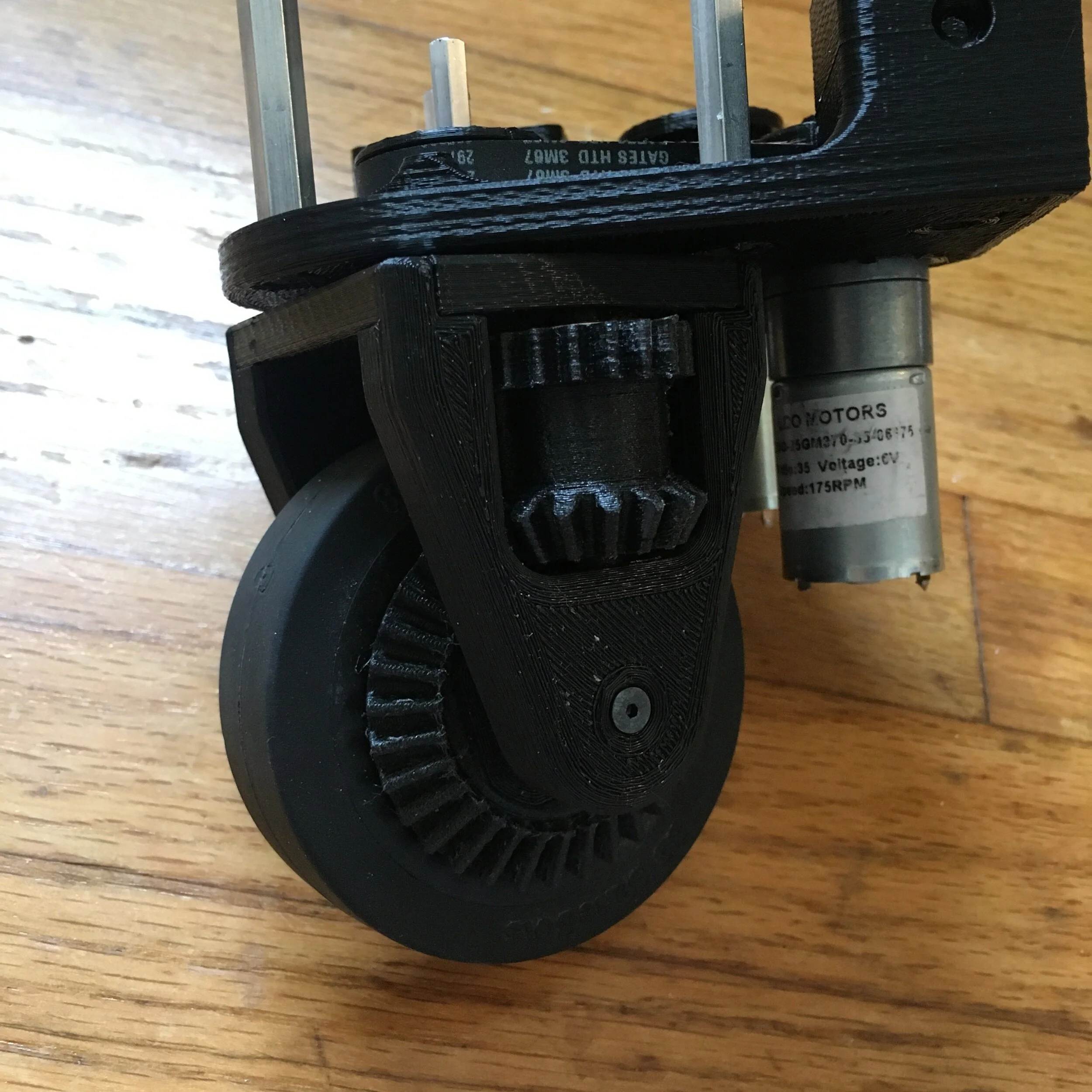
A small amount of redesign and printing later and the new module appeared!
I used the same HTD belts for the module pivot like before, but I’m using GT2 belts for the wheel motor since they are easily bought on Amazon.
Instead of a custom gearbox/belts, I just used another generic 25mm spur gearbox to drive the wheel. I really like the way the 2:1 bevel setup packages in the wheel pod but the wheel motor is already geared down enough by its gearbox so I overdrive ~1:2 to the live shaft and then undo that with the 2:1 wheel bevel gears.
The same magnetic encoder for pivot angle sticks above the pivot motor for position sensing.




The majority of the module is printed out of PLA+ because it’s good enough. The gears are printed in NylonG for durablity purposes and some wear resistance. If I wanted to be extra cool I’d get NylonK but I don’t see the robot getting that much use to warrant it.
My plan is to use some 1/16” wall 1x1 aluminum tubing to bolt the modules together for the frame since I now have a horizontal bandsaw!

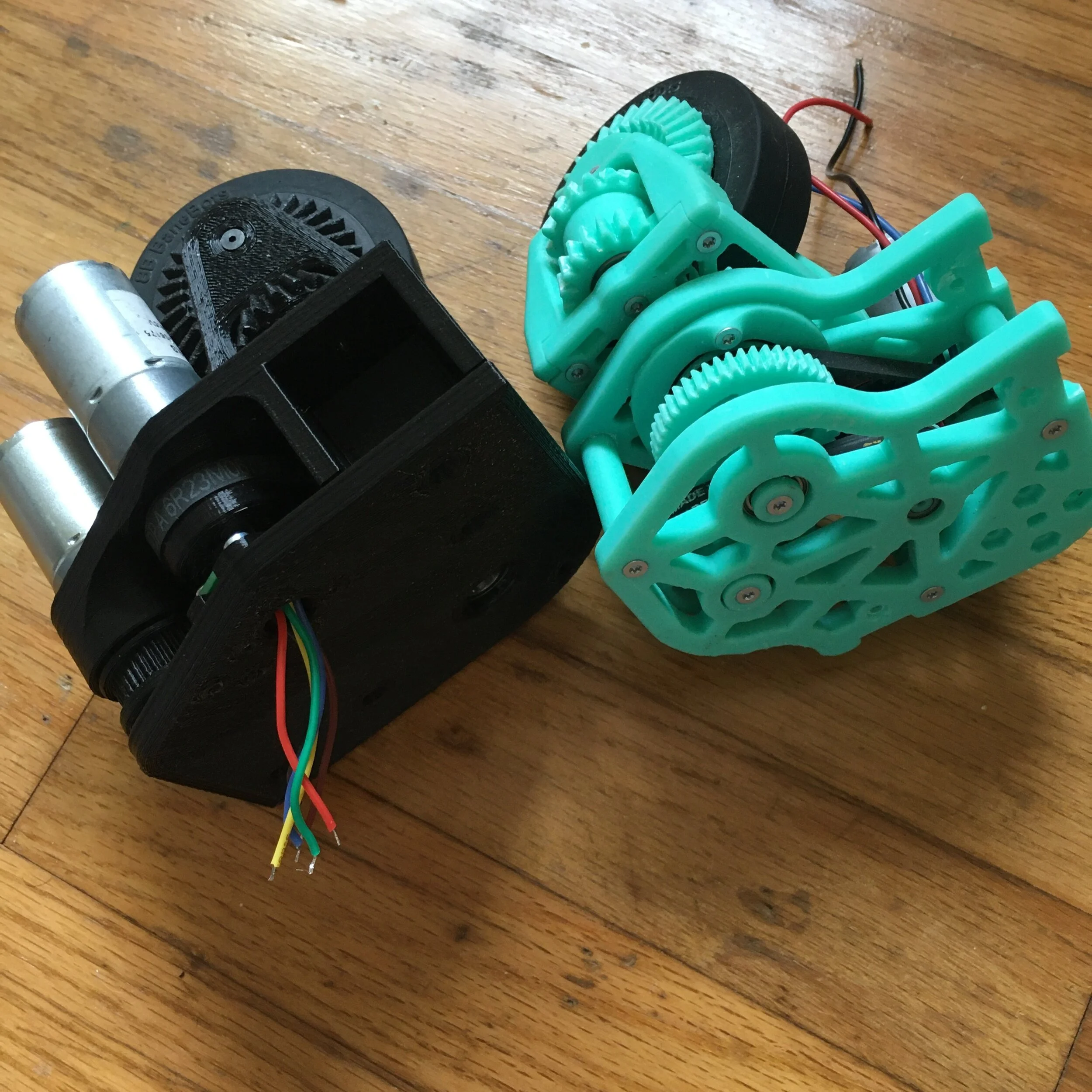
Here’s the new module next to the old. The new modules are certainly less impressive looking but FDM prints don’t benefit from pocketing like DLP prints do. Plus I no longer need to make my own gearbox for the brushless motor.

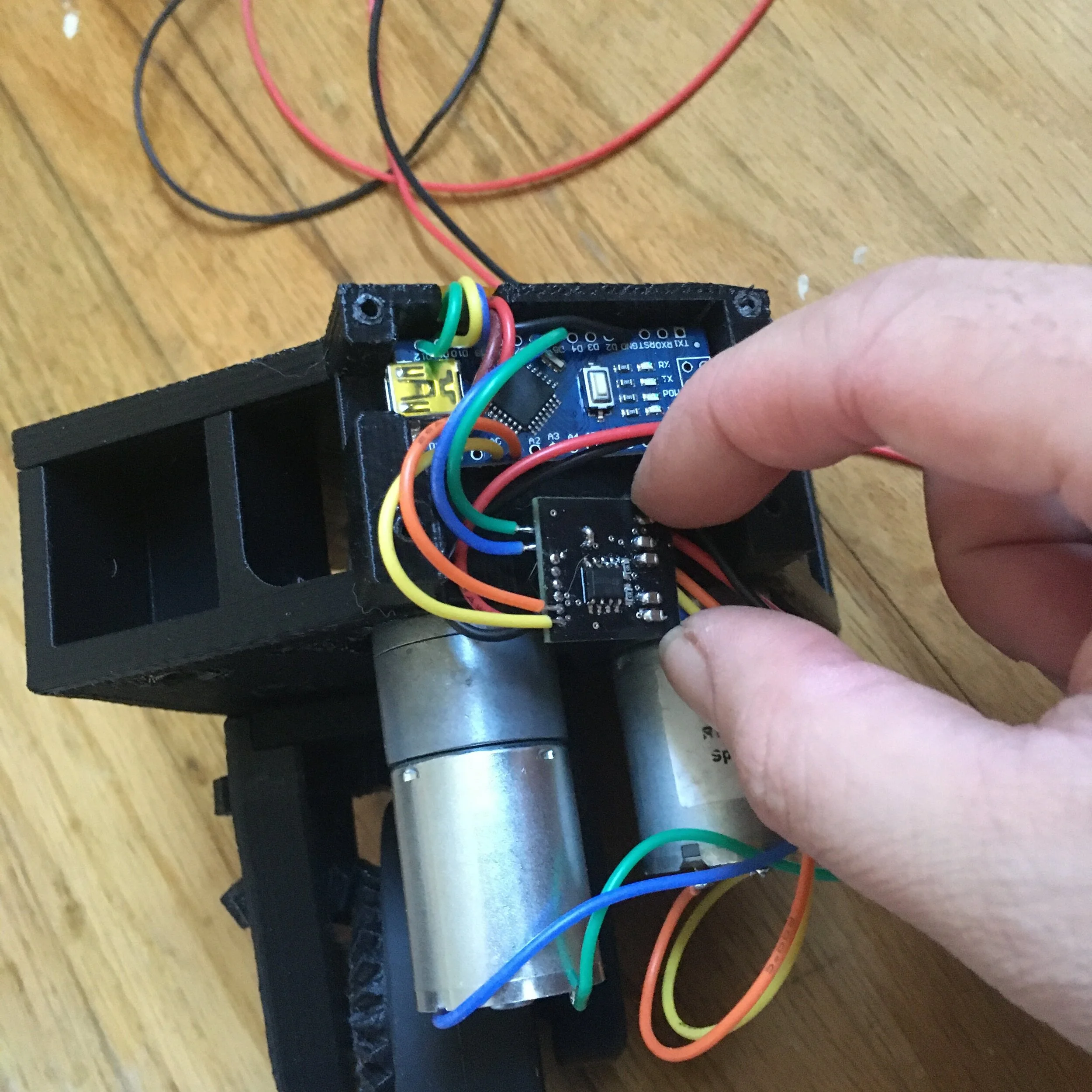
As for electronics, I control the two motors per module with one of my extra tiny two brushed motor controller boards. They’re the ones I was planning on using in small robots, just reprogrammed to not use RC pwm since its not needed here. I would also do the module control on that board but I didn’t break out any bonus microcontroller pins due to size constraints. Instead I have an arduino nano which communicates with the encoder and does the position control. When the module electronics box is sealed, only 3 wires go to the main swerve board (yet to be designed), power, ground, and serial rx for getting module commands (module angle and speed).

Pivot control is working good enough. The slight underdamping will go away when the wheel is on the ground. Unfortunately the velocity data is rather noisy because I get position data fairly slowly and just differentiate it, otherwise I’d add a bit more bonus damping.
Time to make 3 more modules and finish the rest of the robot!
