
Swerve 2021 Pt. 2: It works!!!
Swerve progress has been going quite well and I now have my first swerve that I can drive around my room!
First I’ll talk about the physical build since that’s easy to visualize, but the more difficult part of getting the swerve running was the various communication protocols.

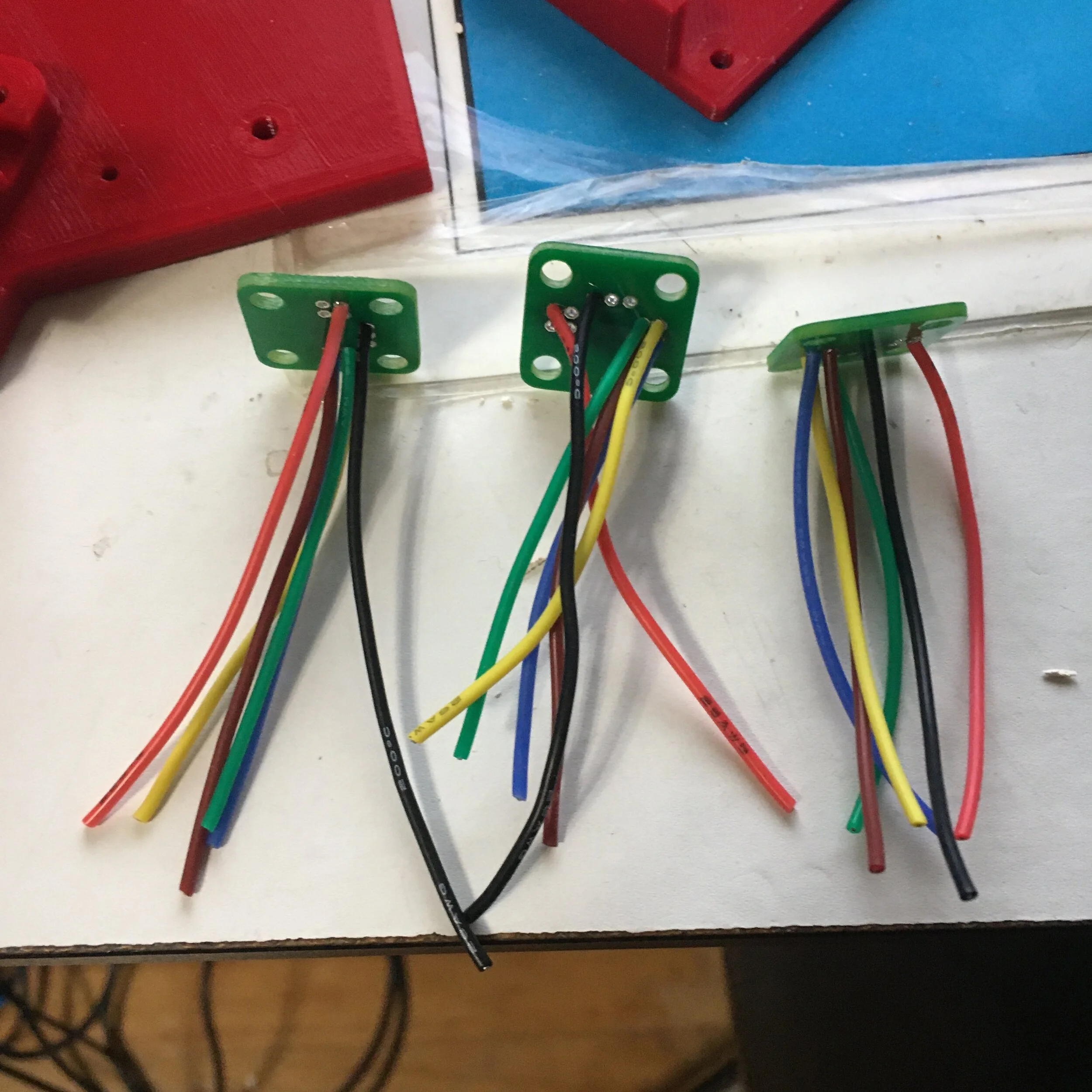
First up was assembling 3 more sets of boards for the modules. As seen in the picture I was originally planning on using one more of my super tiny brushed boards and 2 more of my larger ones, but I ended up ordering the parts to assemble 2 more super tiny ones and only used those. I cut all my wires and color coded them ahead of time to aid in assembly of the modules. Pictured are the encoder breakouts.

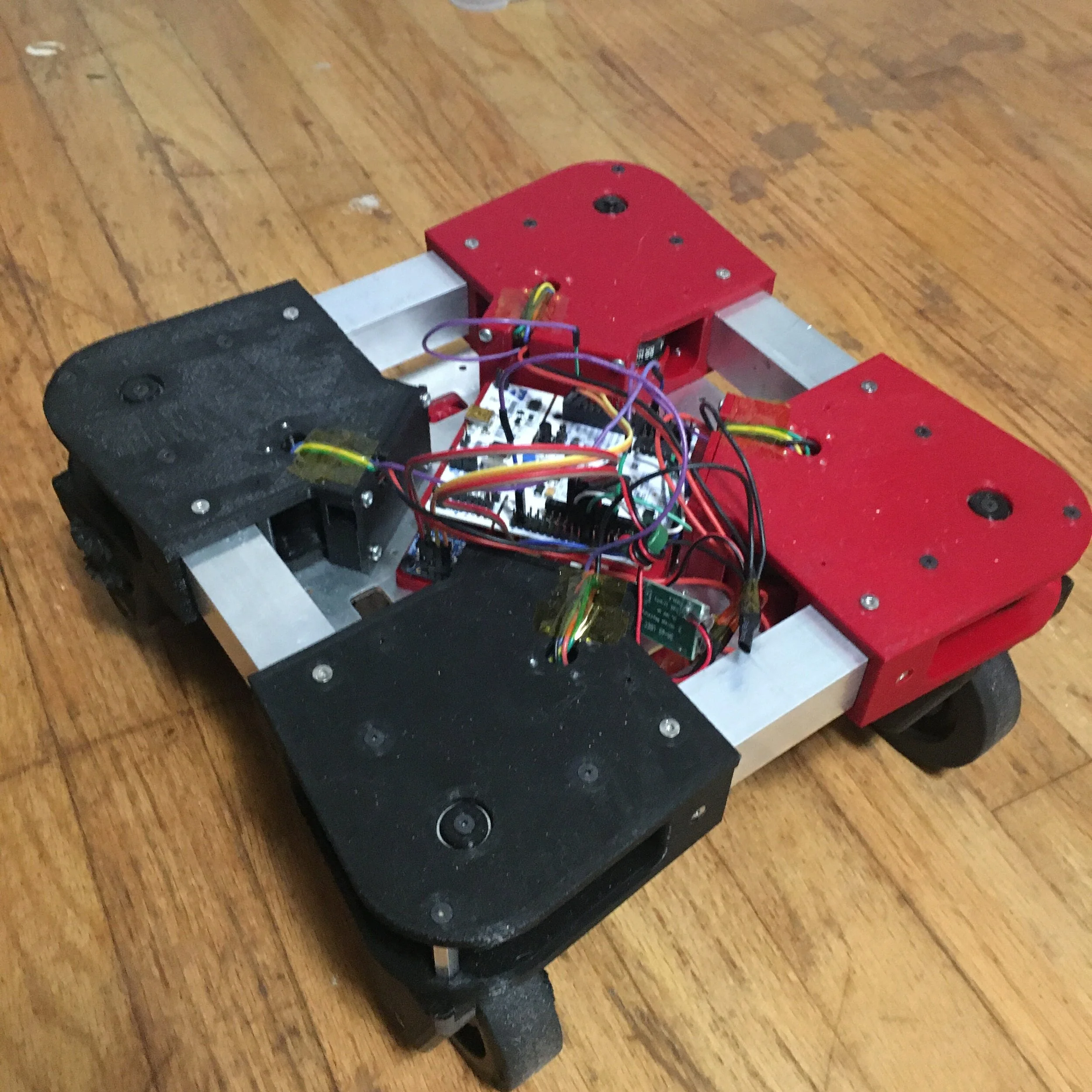
Lots of printing and assembly later I had 4 identical modules. Unfortunately I ran out of black PLA+ but I happened to have a spool of red (yay Uppercut colors). A silver lining is having 2 modules of each color makes the robots orientation very obvious.

I made use of my newly acquired Harbor Freight band saw and cut the frame tubes to length. The cheap band saw cut better than expected.
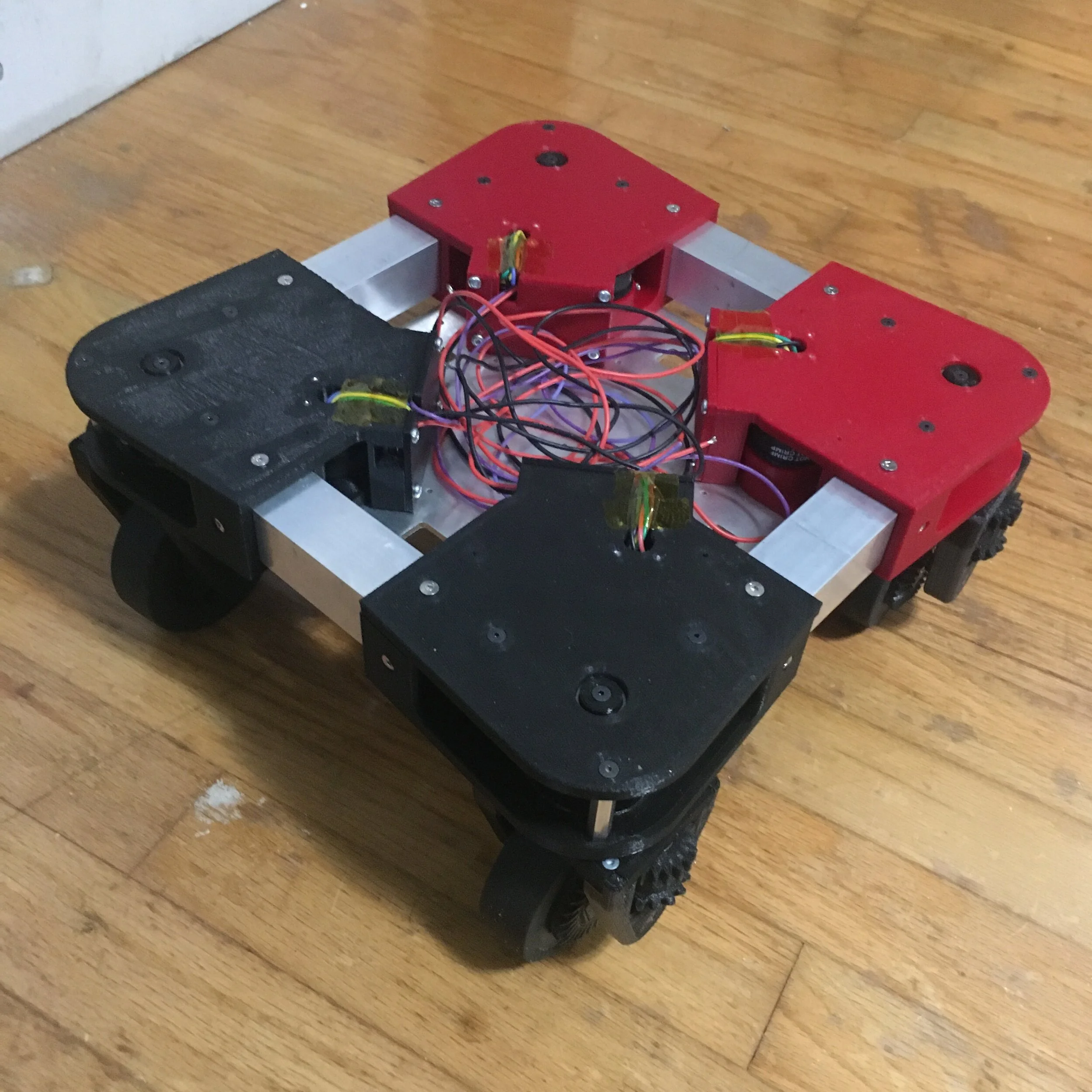
A bit of SendCutSend magic (laser cut 1/8” 6061) later and I had a mostly finished physical robot!

I whipped up a little electronics bay for the time being. It consists of the big white Nucleo, the green sbus receiver (Frsky XM+), and the blue IMU (BNO055). I might lay out a board to replace this contraption once I decide what mechanisms will be mounted to the top of the swerve. But I’m glad I stuck with jumper wires for the time being since plenty of my plans changed as I developed the firmware.

I also made this simple battery box to support a random 4s 5ah lipo I found while in undergrad. It looks like an old Cheetah 3 battery but I didn’t get it from lab haha.

The battery mounts to the bottom to keep the CG low and so when I have a mechanism on the robot I won’t have to unbolt it to charge the battery.
All done!