
Wheeled Biped Update
I haven’t been spending as much time on the wheeled biped as I should (I’ve been more interested in the quadruped and other newer projects), but I’ve made some progress on the controls/software.
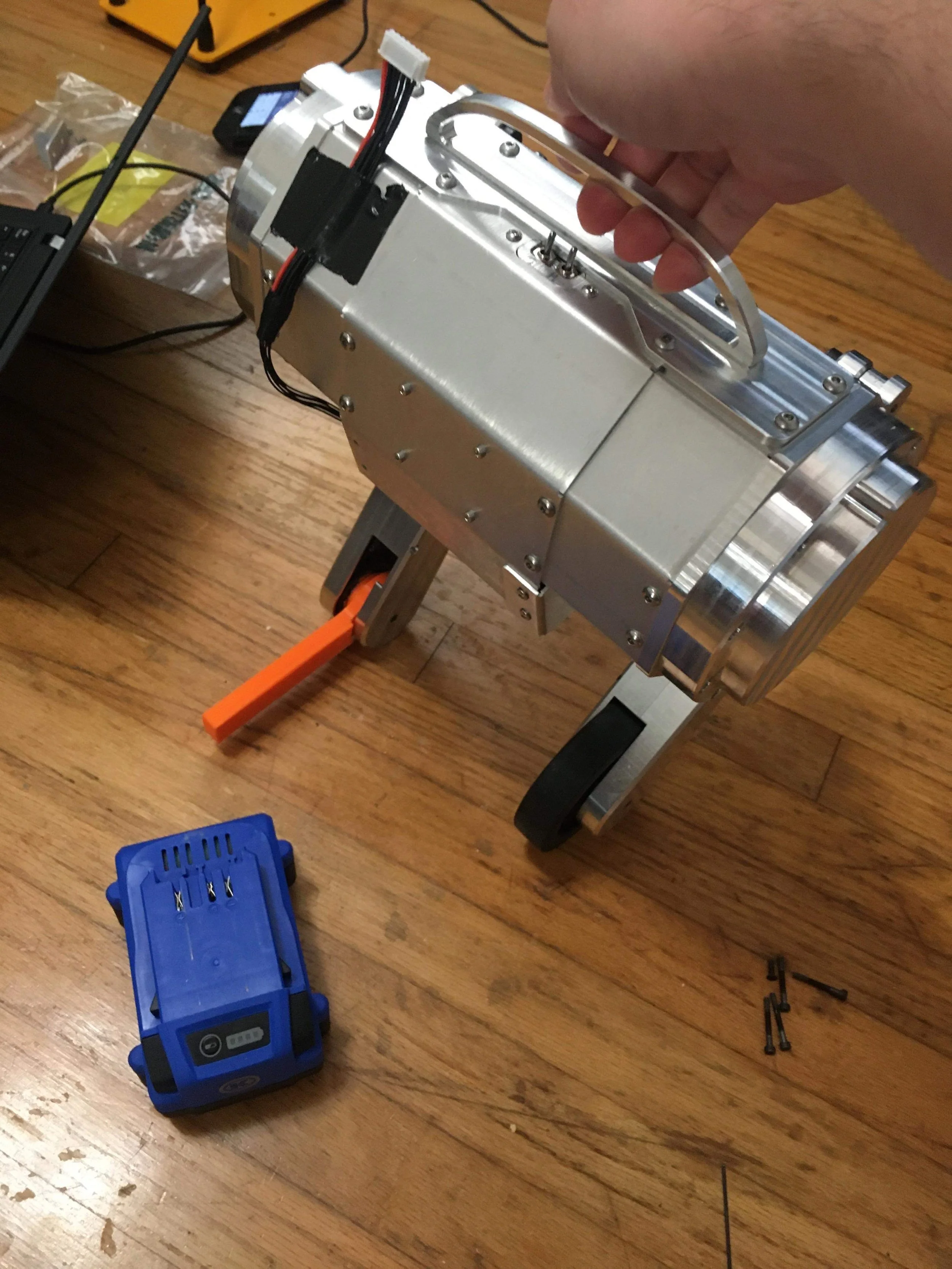
First, randomly throughout the last few months I did some sanity tests to verify the performance of the hardware and existing software.
As you can see this one was done before the programming connector upgrade, but I replaced a wheel with a lever arm and drove it into a scale with a commanded Iq to verify kt.
This test was much more interesting where I clamped the wheel in a vise and rotated the robot’s body by hand, and was able to verify the accuracy and lag of the IMU I was using.

There is a small amount of lag with the IMU’s signal (around 10ms) but the data is quite accurate.

The robot is radio controlled (height, body roll, yaw, and forward/back translation) but definitely needs more software and controls work when I feel motivated. The “jump” in the video is not full torque (its just me manually moving the height setpoint and as you can tell from the jiggliness of the robot, those gains are fairly low) so one day I’ll have it leave the ground.
I also made some reliability improvements (found a flakey XT30 that was powering the logic board, shielded the radio antennaes from the frame better) so I think this version is all set hardware-wise.